大学生新闻网,大学生新闻发布平台
煤矿智能协作巡检机器人:开启矿山安全新篇章
近日,黑龙江科技大学科研团队成功研发出一款煤矿智能协作式巡检机器人,该机器人凭借其先进的技术、卓越的性能以及强大的适应性,有望彻底改变传统煤矿巡检模式,为矿山安全保驾护航。项目一经推出,便受到多家煤矿企业的高度关注,成果转换前景广阔。
一、技术亮点:多技术融合助力智能巡检
(一)多源融合导航技术
针对煤矿井下环境复杂、GPS信号缺失等问题,该机器人创新性地融合了激光雷达、视觉相机与惯性测量单元(IMU),构建起激光雷达惯性视觉里程测量系统(LIVO)。其中,激光雷达负责扫描环境并生成高精度点云数据,视觉相机则提供丰富的纹理信息用于特征提取,IMU用于测量机器人的姿态和加速度。在融合过程中,机器人首先对激光雷达扫描中的运动失真进行补偿,然后计算帧-映射点-平面残差;同时,从视觉全局地图中提取当前视场角内的视觉子地图,并剔除离群点,进行稀疏直接视觉对齐以计算帧到地图的图像光度误差。最终,通过误差状态迭代卡尔曼滤波器,将激光雷达点面残差和图像光度误差与IMU传播紧密融合,实现精确的定位与建图。即使在矿井下复杂的退化环境中,机器人也能凭借此技术精准地进行自定位和探索,为后续的巡检工作提供坚实的技术支撑。
(二)5G+VPN通信技术
为解决矿井下通信信号弱、不稳定的问题,机器人采用了5G+VPN的通信方案。5G网络以其高带宽、低延迟、高可靠性的特点,为机器人提供了高速稳定的数据传输通道。而VPN技术则在此基础上构建了安全的虚拟专用网络,确保数据传输的保密性和完整性。通过将VPN部署于云服务器并与5G网络传输相结合,机器人能够实现与控制中心的实时、安全通信。在矿井下,机器人可以将采集到的各类数据,如环境参数、设备状态、视频图像等,实时传输至地面控制中心;同时,控制中心也能及时向机器人下达指令,实现远程操控和协同作业。这种通信方案不仅提高了巡检工作的效率和准确性,还有效降低了因通信故障导致的安全风险。 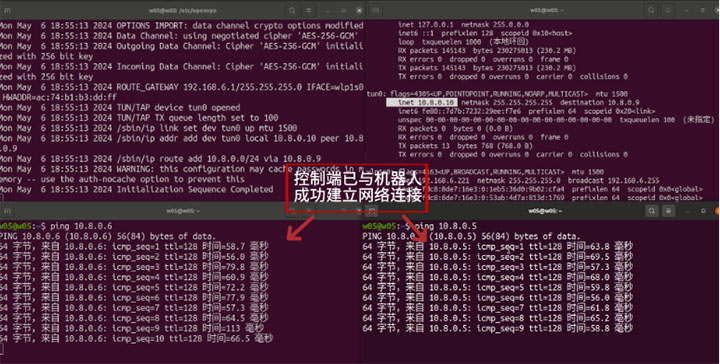 (三)VR+数字孪生技术
(三)VR+数字孪生技术
机器人配备了先进的VR+数字孪生技术,为操作人员提供了一个沉浸式的远程监控和操作平台。通过在VR平台下构建矿井的数字孪生模型,操作人员仿佛身临其境,可以直观地观察矿井下的环境和机器人的工作状态。在这个虚拟环境中,操作人员能够实时获取机器人的位置、姿态、传感器数据等信息,并根据实际需求对机器人进行精准控制。例如,操作人员可以通过VR设备观察机器人在巷道中的巡检情况,当发现异常时,立即下达指令调整机器人的行动路径或工作任务。此外,数字孪生模型还能够对矿井环境和机器人的运行状态进行实时模拟和预测,帮助操作人员提前制定应对策略,提高巡检工作的主动性和前瞻性。  二、创新优势:集群式协作提升巡检效能
二、创新优势:集群式协作提升巡检效能
(一)空地协同,覆盖更广
该机器人创新性地采用了空地协同工作模式,集群包括履带式巡检机器人、变胞式空地两栖巡检机器人和工作协助机器人。履带式机器人配备多种传感器,可在复杂巷道中稳定行驶,对井下设备和环境进行近距离检测;变胞式空地两栖机器人则能根据任务需求,在陆地行驶和空中飞行模式间自由切换,轻松跨越障碍物,快速到达指定位置,实现对矿井的全方位、大范围巡检。在实际应用中,空地机器人相互协作,优势互补。例如,在检测矿井通风情况时,空地两栖机器人可快速飞至通风口处进行气体检测,而履带式机器人则在巷道内进行设备巡检,两者协同工作,大大提高了巡检效率和覆盖范围。
(二)变胞设计,适应多样
变胞式空地两栖机器人的独特设计使其具备强大的适应性。其模态切换系统采用高精度数字舵机和闭环控制系统,能够实现飞行与陆地模式的快速、可靠切换。在飞行模式下,机器人利用螺旋桨产生的升力在空中飞行,可有效避开地面障碍物,快速抵达人工难以到达的区域;在陆地模式下,机器人则切换至轮式行驶,通过定制的外转子无刷电机驱动轮毂,实现稳定行驶。此外,机器人的机臂采用T700碳纤维管和3K斜纹碳纤维材质轮毂,既保证了结构强度,又减轻了自重,提高了机动性和续航能力。这种变胞设计使得机器人能够在不同地形和任务场景中灵活切换,适应煤矿井下多变的环境条件。
(三)三重抗干扰,稳定可靠
机器人搭载的三重抗干扰FOC控制系统,能够有效抵御煤矿巷道内的电磁噪声。FOC控制系统通过精确控制电机的磁场定向,实现高效、稳定的电机驱动。在煤矿井下,由于存在大量的电气设备和金属结构,电磁干扰问题十分突出。该三重抗干扰设计通过硬件滤波、软件算法优化以及电磁屏蔽等多重措施,确保机器人在复杂电磁环境下的稳定运行。即使在强电磁干扰的情况下,机器人也能准确接收和执行控制指令,保持稳定的行驶和工作状态,保障巡检任务的顺利进行。
三、性能卓越:稳定可靠的“矿山卫士”
(一)续航能力出色
在性能测试中,该机器人展现出了令人惊叹的续航能力。陆地机器人在模拟矿井环境中,能够连续不间断作业8小时左右,满足煤矿长时间巡检的需求。其高效的能源管理系统功不可没,该系统能够实时监测电池状态,对电池进行智能充放电控制,并通过优化的电源分配策略,确保各部件在工作过程中获得稳定的电力供应。同时,机器人还配备了超级电容模组作为备用电源,当主电池电量不足时,超级电容能够及时提供电力支持,进一步延长机器人的工作时间,确保巡检任务的连续性。
(二)自定位精度高
陆地机器人自定位误差控制在0.01m-0.05m范围内,这一惊人的精度水平为巡检工作的准确性提供了有力保障。在矿井下,机器人的高精度自定位能力使其能够按照预设的巡检路径精准行驶,避免因定位误差导致的巡检遗漏或重复。无论是狭窄的巷道还是复杂的交叉口,机器人都能准确地识别自己的位置并执行相应的巡检任务。例如,在对矿井中的管道和电缆进行巡检时,机器人能够沿着管道和电缆的走向精准移动,及时发现潜在的安全隐患。  (四)飞行与陆地模式性能优异
(四)飞行与陆地模式性能优异
变胞式空地两栖无人机在飞行模式下,即便在无GPS信号且负载2kg的情况下,仍能实现位置漂移仅±3cm的稳定悬停,最大飞行速度可达10.2m/s,单次续航10分钟;切换至陆地模式,它在平坦地面行驶速度可达1m/s,具备跨越5cm台阶的越障能力,单次续航延长至30分钟。在飞行模式下,无人机能够快速飞越矿井内的各种障碍物,如支架、管道等,对矿井顶部和通风口等难以到达的区域进行全面检测;在陆地模式下,无人机则可以稳定行驶在巷道内,对地面设备和环境进行细致巡检。其出色的越障能力和续航能力使得机器人能够在复杂矿井环境中高效完成巡检任务。
四、团队实力:科研精英汇聚,创新成果频出
(一)专业指导教师引领
该项目由黑龙江科技大学的资深教授领衔指导。指导教师在机器人技术、自动化控制、人工智能等领域拥有深厚的专业知识和丰富的科研经验。他们为团队提供了全面的技术指导和专业的建议,从项目的选题、方案设计到技术实现,全程参与并严格把关。在团队遇到技术难题时,指导教师凭借其深厚的学术造诣和实践经验丰富,为学生提供了关键性的指导,帮助团队突破技术瓶颈,推动项目的顺利进展。  (二)跨学科人才协同
(二)跨学科人才协同
科研团队汇聚了来自不同学科的优秀本科生,成员涵盖机械工程、电子工程、计算机科学、自动化控制等多个专业领域。这种跨学科的人才结构为项目的研发提供了全面的技术支持。机械工程专业的学生负责机器人的机械设计和结构优化,确保机器人具备良好的机动性和稳定性;电子工程专业的学生承担了硬件电路的设计与调试工作,为机器人搭建了高效可靠的电子系统;计算机科学专业的学生则专注于导航算法、图像处理、数据通信等软件方面的研发,赋予了机器人智能化的“大脑”;自动化控制专业的学生优化机器人的控制系统,实现了机器人的精准操控和自动化作业。各专业学生在项目中充分发挥自己的专业优势,紧密合作,形成了强大的研发合力。
(三)科研成果丰硕
团队自成立以来,在各类科技创新竞赛中屡获佳绩,先后荣获国家级和省级奖项多项,充分展示了团队的创新实力和科研水平。这些荣誉的取得不仅是对团队过往努力的肯定,也为项目的进一步发展奠定了坚实的基础。在项目研发过程中,团队成员积极参与科研训练,不断提升自己的科研能力和创新思维。他们将竞赛中积累的经验和技术应用到本项目的研发中,成功解决了多个关键技术难题,确保项目的顺利推进和高质量完成。  五、成果转化:为煤矿企业带来福音
五、成果转化:为煤矿企业带来福音
目前,该项目已与多家大型煤矿企业达成合作意向,有望实现科研成果的快速转化。对于煤矿企业而言,引入该智能协作巡检机器人将带来多方面的显著效益。
(一)降低人工成本
传统煤矿巡检主要依赖人工,需要投入大量的人力和时间。而该机器人的应用将大大减少人工巡检的频次和工作量,降低企业的人力成本投入。一台机器人可以承担相当于多名巡检人员的工作任务,且能够实现24小时不间断作业,提高了巡检工作的效率和经济性。
(二)提升安全水平
煤矿井下环境恶劣,人工巡检面临着巨大的安全风险。机器人代替人工进入危险区域进行巡检,有效避免了因人工操作失误或环境因素导致的安全事故,保障了矿工的生命安全。同时,机器人能够实时监测矿井环境和设备状态,及时发现潜在的安全隐患并发出警报,为企业采取预防措施提供了充足的时间,从而降低事故发生率,提升煤矿企业的整体安全管理水平。
(三)提高生产效率
该机器人具备高效的巡检能力和快速响应机制,能够及时发现设备故障和生产过程中的问题,并将信息反馈至控制中心。企业可以迅速安排维修人员进行处理,减少设备停机时间和生产中断的频率,提高生产的连续性和稳定性。此外,机器人还可以通过对矿井环境的实时监测,为企业的生产决策提供准确的数据支持,帮助企业优化生产布局和工艺流程,进一步提高生产效率和经济效益。
(四)符合政策导向
随着国家对煤矿安全生产和智能化建设的重视程度不断提高,相关政策对煤矿企业的智能化升级改造提出了明确要求。该智能协作巡检机器人的应用,将助力煤矿企业实现智能化转型,满足政策法规的要求,提升企业的社会形象和市场竞争力。企业可以借此机会树立良好的行业标杆,引领煤矿行业的技术发展潮流。
六、未来展望:引领矿山巡检智能化发展
黑龙江科技大学科研团队成功研发的煤矿智能协作式巡检机器人,为矿山安全巡检提供了一种智能化、高效化、可靠化的全新解决方案。该项目在技术创新、系统性能、团队建设以及成果转化等方面均取得了显著成效,具有广阔的应用前景和重要的行业意义。
在未来的发展中,随着技术的不断成熟和完善,煤矿智能协作巡检机器人将在更多煤矿企业中得到推广应用,为我国煤炭工业的安全生产和智能化发展注入强大动力。同时,该机器人的研发经验和技术成果也将为其他相关领域的智能化装备研发提供有益借鉴,推动我国智能机器人技术在工业领域的广泛应用。我们有理由相信,在科研团队的持续努力和煤矿企业的积极配合下,煤矿智能协作巡检机器人将在矿山安全领域发挥越来越重要的作用,开启矿山智能巡检的新纪元,为我国的能源产业安全发展保驾护航。
一、技术亮点:多技术融合助力智能巡检
(一)多源融合导航技术
针对煤矿井下环境复杂、GPS信号缺失等问题,该机器人创新性地融合了激光雷达、视觉相机与惯性测量单元(IMU),构建起激光雷达惯性视觉里程测量系统(LIVO)。其中,激光雷达负责扫描环境并生成高精度点云数据,视觉相机则提供丰富的纹理信息用于特征提取,IMU用于测量机器人的姿态和加速度。在融合过程中,机器人首先对激光雷达扫描中的运动失真进行补偿,然后计算帧-映射点-平面残差;同时,从视觉全局地图中提取当前视场角内的视觉子地图,并剔除离群点,进行稀疏直接视觉对齐以计算帧到地图的图像光度误差。最终,通过误差状态迭代卡尔曼滤波器,将激光雷达点面残差和图像光度误差与IMU传播紧密融合,实现精确的定位与建图。即使在矿井下复杂的退化环境中,机器人也能凭借此技术精准地进行自定位和探索,为后续的巡检工作提供坚实的技术支撑。
(二)5G+VPN通信技术
为解决矿井下通信信号弱、不稳定的问题,机器人采用了5G+VPN的通信方案。5G网络以其高带宽、低延迟、高可靠性的特点,为机器人提供了高速稳定的数据传输通道。而VPN技术则在此基础上构建了安全的虚拟专用网络,确保数据传输的保密性和完整性。通过将VPN部署于云服务器并与5G网络传输相结合,机器人能够实现与控制中心的实时、安全通信。在矿井下,机器人可以将采集到的各类数据,如环境参数、设备状态、视频图像等,实时传输至地面控制中心;同时,控制中心也能及时向机器人下达指令,实现远程操控和协同作业。这种通信方案不仅提高了巡检工作的效率和准确性,还有效降低了因通信故障导致的安全风险。
机器人配备了先进的VR+数字孪生技术,为操作人员提供了一个沉浸式的远程监控和操作平台。通过在VR平台下构建矿井的数字孪生模型,操作人员仿佛身临其境,可以直观地观察矿井下的环境和机器人的工作状态。在这个虚拟环境中,操作人员能够实时获取机器人的位置、姿态、传感器数据等信息,并根据实际需求对机器人进行精准控制。例如,操作人员可以通过VR设备观察机器人在巷道中的巡检情况,当发现异常时,立即下达指令调整机器人的行动路径或工作任务。此外,数字孪生模型还能够对矿井环境和机器人的运行状态进行实时模拟和预测,帮助操作人员提前制定应对策略,提高巡检工作的主动性和前瞻性。
(一)空地协同,覆盖更广
该机器人创新性地采用了空地协同工作模式,集群包括履带式巡检机器人、变胞式空地两栖巡检机器人和工作协助机器人。履带式机器人配备多种传感器,可在复杂巷道中稳定行驶,对井下设备和环境进行近距离检测;变胞式空地两栖机器人则能根据任务需求,在陆地行驶和空中飞行模式间自由切换,轻松跨越障碍物,快速到达指定位置,实现对矿井的全方位、大范围巡检。在实际应用中,空地机器人相互协作,优势互补。例如,在检测矿井通风情况时,空地两栖机器人可快速飞至通风口处进行气体检测,而履带式机器人则在巷道内进行设备巡检,两者协同工作,大大提高了巡检效率和覆盖范围。
(二)变胞设计,适应多样
变胞式空地两栖机器人的独特设计使其具备强大的适应性。其模态切换系统采用高精度数字舵机和闭环控制系统,能够实现飞行与陆地模式的快速、可靠切换。在飞行模式下,机器人利用螺旋桨产生的升力在空中飞行,可有效避开地面障碍物,快速抵达人工难以到达的区域;在陆地模式下,机器人则切换至轮式行驶,通过定制的外转子无刷电机驱动轮毂,实现稳定行驶。此外,机器人的机臂采用T700碳纤维管和3K斜纹碳纤维材质轮毂,既保证了结构强度,又减轻了自重,提高了机动性和续航能力。这种变胞设计使得机器人能够在不同地形和任务场景中灵活切换,适应煤矿井下多变的环境条件。
(三)三重抗干扰,稳定可靠
机器人搭载的三重抗干扰FOC控制系统,能够有效抵御煤矿巷道内的电磁噪声。FOC控制系统通过精确控制电机的磁场定向,实现高效、稳定的电机驱动。在煤矿井下,由于存在大量的电气设备和金属结构,电磁干扰问题十分突出。该三重抗干扰设计通过硬件滤波、软件算法优化以及电磁屏蔽等多重措施,确保机器人在复杂电磁环境下的稳定运行。即使在强电磁干扰的情况下,机器人也能准确接收和执行控制指令,保持稳定的行驶和工作状态,保障巡检任务的顺利进行。
三、性能卓越:稳定可靠的“矿山卫士”
(一)续航能力出色
在性能测试中,该机器人展现出了令人惊叹的续航能力。陆地机器人在模拟矿井环境中,能够连续不间断作业8小时左右,满足煤矿长时间巡检的需求。其高效的能源管理系统功不可没,该系统能够实时监测电池状态,对电池进行智能充放电控制,并通过优化的电源分配策略,确保各部件在工作过程中获得稳定的电力供应。同时,机器人还配备了超级电容模组作为备用电源,当主电池电量不足时,超级电容能够及时提供电力支持,进一步延长机器人的工作时间,确保巡检任务的连续性。
(二)自定位精度高
陆地机器人自定位误差控制在0.01m-0.05m范围内,这一惊人的精度水平为巡检工作的准确性提供了有力保障。在矿井下,机器人的高精度自定位能力使其能够按照预设的巡检路径精准行驶,避免因定位误差导致的巡检遗漏或重复。无论是狭窄的巷道还是复杂的交叉口,机器人都能准确地识别自己的位置并执行相应的巡检任务。例如,在对矿井中的管道和电缆进行巡检时,机器人能够沿着管道和电缆的走向精准移动,及时发现潜在的安全隐患。
变胞式空地两栖无人机在飞行模式下,即便在无GPS信号且负载2kg的情况下,仍能实现位置漂移仅±3cm的稳定悬停,最大飞行速度可达10.2m/s,单次续航10分钟;切换至陆地模式,它在平坦地面行驶速度可达1m/s,具备跨越5cm台阶的越障能力,单次续航延长至30分钟。在飞行模式下,无人机能够快速飞越矿井内的各种障碍物,如支架、管道等,对矿井顶部和通风口等难以到达的区域进行全面检测;在陆地模式下,无人机则可以稳定行驶在巷道内,对地面设备和环境进行细致巡检。其出色的越障能力和续航能力使得机器人能够在复杂矿井环境中高效完成巡检任务。
四、团队实力:科研精英汇聚,创新成果频出
(一)专业指导教师引领
该项目由黑龙江科技大学的资深教授领衔指导。指导教师在机器人技术、自动化控制、人工智能等领域拥有深厚的专业知识和丰富的科研经验。他们为团队提供了全面的技术指导和专业的建议,从项目的选题、方案设计到技术实现,全程参与并严格把关。在团队遇到技术难题时,指导教师凭借其深厚的学术造诣和实践经验丰富,为学生提供了关键性的指导,帮助团队突破技术瓶颈,推动项目的顺利进展。
科研团队汇聚了来自不同学科的优秀本科生,成员涵盖机械工程、电子工程、计算机科学、自动化控制等多个专业领域。这种跨学科的人才结构为项目的研发提供了全面的技术支持。机械工程专业的学生负责机器人的机械设计和结构优化,确保机器人具备良好的机动性和稳定性;电子工程专业的学生承担了硬件电路的设计与调试工作,为机器人搭建了高效可靠的电子系统;计算机科学专业的学生则专注于导航算法、图像处理、数据通信等软件方面的研发,赋予了机器人智能化的“大脑”;自动化控制专业的学生优化机器人的控制系统,实现了机器人的精准操控和自动化作业。各专业学生在项目中充分发挥自己的专业优势,紧密合作,形成了强大的研发合力。
(三)科研成果丰硕
团队自成立以来,在各类科技创新竞赛中屡获佳绩,先后荣获国家级和省级奖项多项,充分展示了团队的创新实力和科研水平。这些荣誉的取得不仅是对团队过往努力的肯定,也为项目的进一步发展奠定了坚实的基础。在项目研发过程中,团队成员积极参与科研训练,不断提升自己的科研能力和创新思维。他们将竞赛中积累的经验和技术应用到本项目的研发中,成功解决了多个关键技术难题,确保项目的顺利推进和高质量完成。
目前,该项目已与多家大型煤矿企业达成合作意向,有望实现科研成果的快速转化。对于煤矿企业而言,引入该智能协作巡检机器人将带来多方面的显著效益。
(一)降低人工成本
传统煤矿巡检主要依赖人工,需要投入大量的人力和时间。而该机器人的应用将大大减少人工巡检的频次和工作量,降低企业的人力成本投入。一台机器人可以承担相当于多名巡检人员的工作任务,且能够实现24小时不间断作业,提高了巡检工作的效率和经济性。
(二)提升安全水平
煤矿井下环境恶劣,人工巡检面临着巨大的安全风险。机器人代替人工进入危险区域进行巡检,有效避免了因人工操作失误或环境因素导致的安全事故,保障了矿工的生命安全。同时,机器人能够实时监测矿井环境和设备状态,及时发现潜在的安全隐患并发出警报,为企业采取预防措施提供了充足的时间,从而降低事故发生率,提升煤矿企业的整体安全管理水平。
(三)提高生产效率
该机器人具备高效的巡检能力和快速响应机制,能够及时发现设备故障和生产过程中的问题,并将信息反馈至控制中心。企业可以迅速安排维修人员进行处理,减少设备停机时间和生产中断的频率,提高生产的连续性和稳定性。此外,机器人还可以通过对矿井环境的实时监测,为企业的生产决策提供准确的数据支持,帮助企业优化生产布局和工艺流程,进一步提高生产效率和经济效益。
(四)符合政策导向
随着国家对煤矿安全生产和智能化建设的重视程度不断提高,相关政策对煤矿企业的智能化升级改造提出了明确要求。该智能协作巡检机器人的应用,将助力煤矿企业实现智能化转型,满足政策法规的要求,提升企业的社会形象和市场竞争力。企业可以借此机会树立良好的行业标杆,引领煤矿行业的技术发展潮流。
六、未来展望:引领矿山巡检智能化发展
黑龙江科技大学科研团队成功研发的煤矿智能协作式巡检机器人,为矿山安全巡检提供了一种智能化、高效化、可靠化的全新解决方案。该项目在技术创新、系统性能、团队建设以及成果转化等方面均取得了显著成效,具有广阔的应用前景和重要的行业意义。
在未来的发展中,随着技术的不断成熟和完善,煤矿智能协作巡检机器人将在更多煤矿企业中得到推广应用,为我国煤炭工业的安全生产和智能化发展注入强大动力。同时,该机器人的研发经验和技术成果也将为其他相关领域的智能化装备研发提供有益借鉴,推动我国智能机器人技术在工业领域的广泛应用。我们有理由相信,在科研团队的持续努力和煤矿企业的积极配合下,煤矿智能协作巡检机器人将在矿山安全领域发挥越来越重要的作用,开启矿山智能巡检的新纪元,为我国的能源产业安全发展保驾护航。
- 作者:大学生新闻网 来源:大学生新闻网
- 发布时间:2025-05-21 阅读:
- 扫一扫 分享悦读

- 探秘化工科技,感受产业脉搏
- 当实验室的精密仪器遇上轰鸣的生产线,当课本里的化学方程式转化为真实的产品,一场别开生面的知识碰撞正在上演。
- 05-22 关注:0
- 煤矿智能协作巡检机器人:开启矿山安全新篇章
- 近日,黑龙江科技大学科研团队成功研发出一款煤矿智能协作式巡检机器人,该机器人凭借其先进的技术、卓越的性能以及强大的适应性
- 05-21 关注:7

- 社会实践“满”布敦煌学生成长每一个环节
- 临近小满时节,一场充满生命力的社会实践活动,正在敦煌的田野乡间如火如荼地展开。
- 05-21 关注:3
- 大学生社会实践攻略——社会实践如何“玩”出彩?
- 每年寒暑假,全国性、校方组织、自主实践等各类活动层出不穷,成为大学生走出校园、接触社会的宝贵机会。
- 05-19 关注:10

- 琅琊山下“救”在行动,青春力量共筑生命安全防线
- 红树青山日欲斜,长郊草色绿无涯。
- 05-17 关注:6

- 长沙理工大学学子调研新宁非遗数字化传播
- “上一个岭来耶,下一个坡咧”崀山峒歌古谣通过短视频平台传唱全国。
- 05-17 关注:9

- “衣脉相承”——记录采茶衣锦,让传统针脚跃动乡村振兴舞台
- 为系统梳理桂南采茶戏服饰的文化内涵,“非遗文化推广,赋能乡村振兴——广西玉林市博白采茶戏的推广调研”项目团队近日深入博白县民间
- 05-16 关注:7

- 政校联动创新防艾宣传模式 社区集市共筑健康防护网络
- 正值2025年职业教育活动周,重庆电子科技职业大学禁毒防艾社团积极响应“一技在手,一生无忧”的职教周主题
- 05-16 关注:3
-
大学生新闻网©版权所有